|
En autopilot är bland de mest avancerade och tekniskt sofistikerade instrument du kan ha i din båt. Det är lätt att använda en autopilot, men det kan ändå vara bra att förstå hur den fungerar och varför den kan beter sig som den gör under olika förhållanden till sjöss. Att känna sin utrustning är viktigt för säkerheten. Autopiloten är i grunden ett reglersystem som styr båten automatiskt efter en kurs du bestämt. Alla autopiloter fungerar på ungefär samma sätt, så denna beskrivning är mer eller mindre generell för autopiloter av olika fabrikat och modell.
Ett reglersystem arbetar med att jämföra vad som brukar kallas Ärvärde och Börvärde. För en autopilot är Börvärdet den kompasskurs (Referenskurs) som båten är inställd på att följa i autoläge. Ärvärdet är den verkliga kompasskursen som båten stävar mot och ges av den Elektroniska Kompassen 10 gånger per sekund. När båten avviker ur kurs dvs verkliga kompasskursen ändras, eller, om den inställda referenskursen ändras av skepparen, då reagerar autopiloten. Genom elektriska signaler aktiveras drivenheten och rodret vrids tills båten återgår till den önskade referenskursen. Rodervinkeln återkopplas kontinuerligt via roderlägesgivaren till styrdatorn.
För att anpassa autopiloten till båten utformning och omgivningens förutsättningar finns det tekniska parametrar som kan behöva justeras. Normalt är fabriksinställningarna bra för de flesta typer av båtar och väderförhållanden, men om du behöver göra det är det bra att veta vad de är till för. De två viktigaste av dessa parametrar är de för Känslighet och Roderfaktor. De är lätt tillgängliga från manöverpanelen för att kunna anpassas dynamiskt under färd för ändrade väder och lastförhållanden. De förklaras nedan:
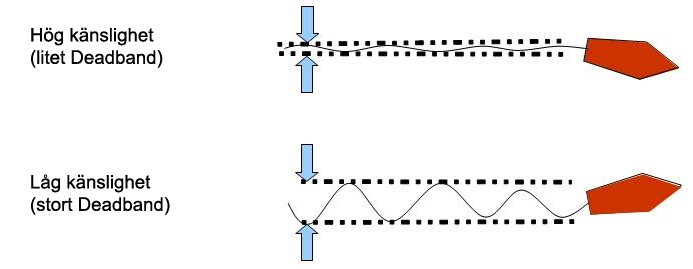
Känslighet (Deadband)
Huvuduppgift för en autopilot är att låsa båtens kurs till en förbestämd referenskurs. Men det är nödvändigt att göra en avvägning mellan noggrannheten i att hålla referenskursen och aktiviteten hos drivenheten. Ju mer exakt du vill hålla kursen desto mer måste drivenheten arbeta. Det sliter på hela styrsystemet och drar onödigt mycket elektrisk energi.
Med Känsligheten ställer man in hur mycket båten får avvika från referenskursen innan drivenheten aktiveras. Det vill säga hur stor skillnaden mellan Börvärdet och Ärvärdet tillåts vara. Det brukar kallas för autopilotens Deadband (döda område). En högt värde på känslighet gör det möjligt för båten att driva längre ur kurs innan autopiloten reagerar och ger roder. Med ett lågt värde på känslighet kommer autopiloten att hålla båten mer exakt på rätt kurs.
Med parametern för Känslighet kan användaren kalibrera och finjustera autopiloten tills man hittar en balans mellan noggrannhet och aktiviteten på drivenheten.
Du ställer parametern under färd i lugnt väder så lågt som möjligt, utan att drivenheten kontinuerlig "jagar" från sida till sida. Den lägsta möjliga inställningen på känslighet beror på många samverkande faktorer såsom slack i styrsystemet, vibrationer runt rodret, roderlägesgivarens monteringsläge, drivenhetens egenskaper och inte minst väderförhållanden. Ett för lågt värde kommer att orsaka onödigt slitage på ditt styrsystem, och i allvarliga fall orsaka fel.
Det kan även vara nödvändigt att ändra inställningen under resan på grund av nya omständigheter som omslag i väder och vind eller nya lastförhållanden. I hårt väder kan du behöva öka värdet och låta båten följa vågorna utan att kursen korrigeras hela tiden.
Den nya inställningen på Känslighet sparas i minnet när autopiloten stängs av.
Roderfaktor
 Roderfaktorn är den viktigaste variabeln för att anpassa autopiloten till båtens egenskaper som bestäms av rodrets utformning och båtens storlek och köl. Man kan behöva experimentera med denna inställning för att hitta en optimal inställning. När båtens kurs avviker från referenskursen aktiveras drivenheten och rodret vrids. Rodrets vinkel är proportionell till kursavvikelsen i grader. Man brukar säga att man med denna variabel ändrar rodrets förstärkning. Förstärkningen är kvoten mellan rodervinkeln och kursavvikelsen.
Roderfaktorn är den viktigaste variabeln för att anpassa autopiloten till båtens egenskaper som bestäms av rodrets utformning och båtens storlek och köl. Man kan behöva experimentera med denna inställning för att hitta en optimal inställning. När båtens kurs avviker från referenskursen aktiveras drivenheten och rodret vrids. Rodrets vinkel är proportionell till kursavvikelsen i grader. Man brukar säga att man med denna variabel ändrar rodrets förstärkning. Förstärkningen är kvoten mellan rodervinkeln och kursavvikelsen.
Roderfaktorn brukar ha ett nominellt värde på 1 – 10. I allmänhet så behöver en båt med ett relativt stort roder eller en liten köl ett lägre värde på roderfaktorn. En stor långsam båt kan däremot behöva ett högre värde på roderfaktorn. Det kan även vara nödvändigt att korrigera roderfaktorn beroende på båtens hastighet. Låga hastigheter kan kräva en högre roderfaktor och höga hastigheter en lägre roderfaktor.
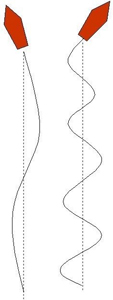
I stora eller långsamma båtar kan roderfaktorn behöva ökas, medan det i lätta eller snabba båtar kan fungera bättre med ett lägre värde. Ställs roderfaktorn för högt kan det orsaka överstyrning. För lågt i inställd roderfaktor kan orsaka understyrning och en långsam respons.
På bilden visas vad som händer när roderfaktorn är för låg (till vänster) och när den är för hög (till höger). Rörelserna hos båten är naturligtvis överdrivna i åskådliggörande syfte. I verkligheten när värdet är rätt inställt ska båten ska gå efter en rak linje. Eventuell justering av denna parameter bör göras när havet är lugnt.
Funktionslägen
En autopilot är användbar på flera sätt och har olika funktionslägen beroende på vad du vill göra. Vid påslagning kommer den alltid ställas på manuellt läge eller ”stand-by”. De olika funktionstillstånden förklaras nedan:
Manuellt läge: Innebär att båten styrs manuellt och autopiloten är beredd att ta över, Standby. Manöverpanelens display visar den magnetiska kursen given av den elektroniska kompassen.
Auto läge: Innebär att autopiloten är aktiverad och styr båten efter den referenskurs som visas på displayen. Referenskursen kommer att vara den kurs båten styrde efter när autoläget aktiverades. Du kan i autoläget korrigera referenskursen genom att trycka på pilknapparna på AP47 och AP55.
GPS läge:
I GPS läget fungerar autopiloten på ett lite annorlunda sätt än i autoläge. En GPS använder inte magnetisk kurs. I stället bestäms båtens geografiska position utifrån de radiosignaler som skickas från stationära satelliter. Med en GPS ansluten kan man navigera mot ett mål efter en på för hand upplagd färdplan. Med en GPS plotter och ett digitalt sjökort lägger man in koordinaterna för de vägmärken som valt att lägga rutten efter.
GPS navigatorn måste vara kompatibel med standarden NMEA 0183 och inställd på att automatiskt skicka BOD (Bäring Origination till Destination) till autopiloten. Bäringen är kursen från föregående vägmärke (n) till nästa vägmärke (n+1). Då båten närmar sig ett vägmärke ställer GPS enheten om till en ny bäring mot nästa vägmärke enligt färdplanen. Autopiloten svänger båten asymptotiskt in mot det nya spåret och håller sedan bäringen till det nya vägmärket. En GPS som hanterar en vägplan skickar information om aktuell avvikelse i meter från det önskade spåret till nästa vägmärke. Denna data kallas för XTE. Autopiloten som tar emot denna information strävar hela tiden att minimera denna avvikelse från spåret och bäringen.
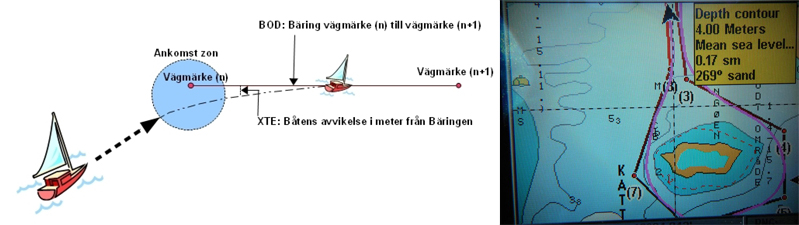
På bilden ovan till höger kan du se hur det ser ut på en GPS plotter. Observera att båten inte kommer att korsa vägmärket, när den är tillräckligt nära delmålet kommer autopiloten automatiskt inleda sväng och styra asymptotiskt mot nästa vägmärke.
Många har missuppfattat hur autopiloten fungerar när man kopplat den till en GPS. Man tror att autopiloten tar all information från GPS enheten och inte längre behöver kompassen. Detta är inte sant. Som ovan beskrivits skickar GPS enheten två meddelanden till autopiloten, BOD och XTE. Den aktuella kursen får autopiloten som vanligt från kompassen. Det skulle gå att ta kursinformation även från GPS enheten men den är alldeles för långsam. Den skickar bara ut kursen högst en gång per sekund i jämföresle med kompassen som skickar kursinformation 10 gånger per sekund.
Servo läge:
Autopilotens Servoläge ger möjlighet till elektrisk styrning av båten. I servoläget styrs båten manuellt av skepparen, men med hjälp av kraften från drivenheten. Det är ett bekvämt sätt att styra båten. Till utbyggbara autopiloter som TMQ AP55, kan man som tillbehör ansluta en handhållen fjärrkontroll för att styra båten och även aktivera/deaktivera autopiloten. Man kan även ansluta ett elektriskt styrnav med FFU. Kan vara ett mycket bra alternativ om man har en trögstyrd båt och en servostyrning med hydraulslangar är svårt och dyrbart att installera.
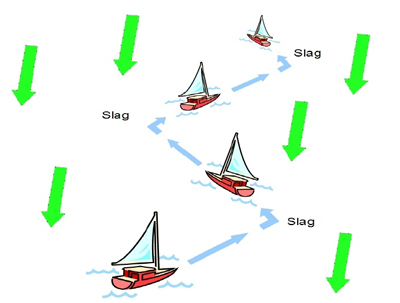 Vind läge: Vissa autopiloter kan fungera med en vindsensor som indata. Beteendet hos autopiloten är något annorlunda även i detta fall. I stället för att låsa till en referenskurs eller en bäring kommer autopiloten att låsa till en viss vinkel mot vinden. När båten kryssar, kommer den nya kursen ha samma relativa vindvinkel fast på motsatt sida av båten.
Vind läge: Vissa autopiloter kan fungera med en vindsensor som indata. Beteendet hos autopiloten är något annorlunda även i detta fall. I stället för att låsa till en referenskurs eller en bäring kommer autopiloten att låsa till en viss vinkel mot vinden. När båten kryssar, kommer den nya kursen ha samma relativa vindvinkel fast på motsatt sida av båten.
Genom att trycka på den ena piltangenten i tre sekunder ”slår” eller ”gippar” segelbåten. Om vinden kommer 45 grader från babord trycks höger piltangent varvid autopiloten styr rodret och båten girar så att den nya vindvinkeln blir 45 grader styrbord. Det går också att justera vinkeln relativt vinden med korta knapptryckningar, en grad i taget.
Vindläget är främst avsedd för långa seglatser på öppet hav när det är bekvämt att styra efter vinden. När vinden ändras anpassar autopiloten sig till en ny bana där den relativa vinkel mot vinden bibehålls. Vindfunktionen finns på TMQ AP47R. Kräver en vindsensor som kan skicka information om vindriktningen enligt standarden NMEA 0183.
|

 Prenumerera på info
Prenumerera på info